SimulationX - Multi-Body Systems
Learn about MBS (Multi-Body System) mechanics, understand the library, and practically apply the modeling concept with examples.


Audience
All

Prerequisites

LEARNING PATH
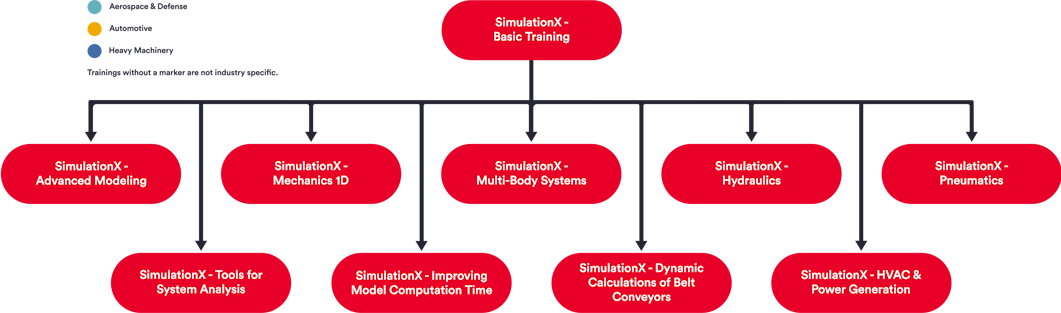
SUGGESTED COURSES

概要
In this training course, participants will learn how to build an MBS model within SimulationX, including the demonstration of basic elements such as rigid bodies, joints, and forces. The proper definition of initial positions is explained. The focus of this training is the correct handling of closed kinematic loops in SimulationX. During the training, numerous practical examples are used for explanation.
お探しのものが見つかりませんでしたか?
カスタマイズトレーニングを依頼

TRAINING PROGRAM
Day 1
- Features of Graphical User Interface MBS-Mechanics (3D view, camera control, …)
- Modelling concept and its implementation in the library:
- Modelling and discretization
- Spatial position description (global and local coordinate system, orientation, initial position)
- Properties and use of model elements from the MBS-Mechanics library:
- Demonstration of main features of selected elements such as rigid body, joints, forces, constraints, etc.
- Model elements with interfaces tother libraries
- Detailed discussion of open and closed kinematic chains
- Definition of initial states
- Exercises:
- Industrial robot
- McPherson strut (wheel suspension)
- Four-bar crank swing arm
- Toggle mechanism