Tips & Tricks
Collisions- Detection, Handling, Solid Mechanics Workflow (long form)
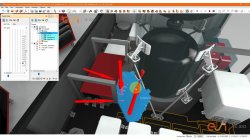
Video example of the complete workflow to define interactions needed to validate the assembly/installation/removal of a component using Solid Mechanics for Rigid Bodies in IC.IDO
José
Terrades Cuquerella
Virtual Reality

Collaborate in IC.IDO w/ remote sites, no IDO.Cooperate
Conducting and sharing an review of new assembly or service processes for new products and associated working environments when not all participants have ability or desire to join via IC.IDO.Cooperate funtionality. Such as screen sharing with web meeting tools like MS Teams, Google Meet, Zoom, or Webex.
Eric
Kam
Virtual Reality
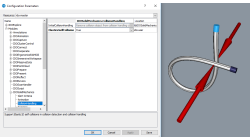
How to avoid Self-Collision of Elastic1D objects
This article describes how to enable the check for self-collision of elastic1d objects in IC.IDO 13.1, and to avoid such self-penetration.
Frank
Schoeffel
Virtual Reality
Running IC.IDO on a 4K monitor (Admin)
When running IC.IDO on a high DPI / 4K monitor, the Desktop UI layout looks "broken" and parts are unreadable. Since Windows 10 version 1803, there is a setting that helps to get the IC.IDO Desktop UI being displayed properly.
Frank
Schoeffel
Virtual Reality
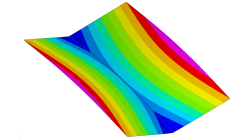
Delta T Offset For Bowing Effect in Assembly Process
In case of butt joint of two plates, in reality, there is an eccentricity e between the neutral phase of bending and the centre of the tendon force caused by the weld which causes the typical horse saddle of a butt welded flat plate.. A functionality Delta T Offset has been developed in order to overcome the limitation due to the shrinkage methodology that cannot provide correct results for a butt joint with a non-symmetrical welding. With this new development, it will be possible to apply an offset value on the thermal loading between upper and lower surfaces of shell. In consequence, the horse saddle effect of a butt welded flat plate is produced with Assembly solution.
Yonggang
Duan
Welding & Assembly
SteamVR Binding errors when using HTC Vive Tracker (ADMINISTRATOR)
Recent Vive Tracker Changes: Latest SteamVR Updates in October 2018 have changed the default behavior for Vive Trackers, and it is causing some confusion. We want to explain how to mitigate the setup for using Vive Tracker with IC.IDO.
Virtual Reality
New Physics Solver "ICA Stiff Solver" (USER)
IC.IDO 12.1 introduces the next generation of physics solver. The new solver focuses on improvements of performance and stability in general, but also puts focus on Elastic1D-Elastic1D and Elastic1D-Rigid contact situations resulting in improved collision handling and more realistic deformation of the Elastic1D shape. The new Physics Solver ‘ICA Stiff Solver’ is the new default solver in 12.1. This article explains about the main differences and improvements compared to the earlier solver, and gives hints for how to work with the new solver for achieving best user experience.
Frank
Schoeffel
Virtual Reality

Tips for Immersive Workspace Parameters (USER)
This is a description of several parameters of the Immersive Workspace module within IC.IDO. This document helps you to understand the different parameters in order to set up your immersive environment for your needs.
Frank
Schoeffel
Virtual Reality

Switch Ergonomics module in IC.IDO 11.2 (ADMINISTRATOR)
IC.IDO 11.2 introduces the new IDO.ErgonomicsRAMSIS module with the digital human model based on RAMSIS, while still offering as well the previous IDO.Ergonomics module based on CharAT. If users need to switch frequently between the two modules, we describe here the required steps to set up a quick switching option.
Frank
Schoeffel
Virtual Reality

Laptop Graphics Support with IC.IDO (ADMINISTRATOR)
IC.IDO 11.2 supports HMD-ready laptops, i.e. laptops with NVIDIA Quadro P4000/P5000 graphics cards. However on systems with both onboard- and dedicated Quadro graphics card, care has to be taken that IC.IDO utilized the High-Performance graphics card.
Frank
Schoeffel
Virtual Reality